Current Research
Design of an Agricultural Robot for Beekeeping Management
-
Design of a mobile intelligent device equipped with beehives and beekeeping equipment.
-
Development of motion control algorithms by combining with speed and position feedback signals for auxiliary work of beekeeping.
-
Development of a coupling mechanism for attaching and detaching the moving mechanism (vehicle) and the loading platform.
-
Design of transport planning and tracking algorithms for beekeeping management.







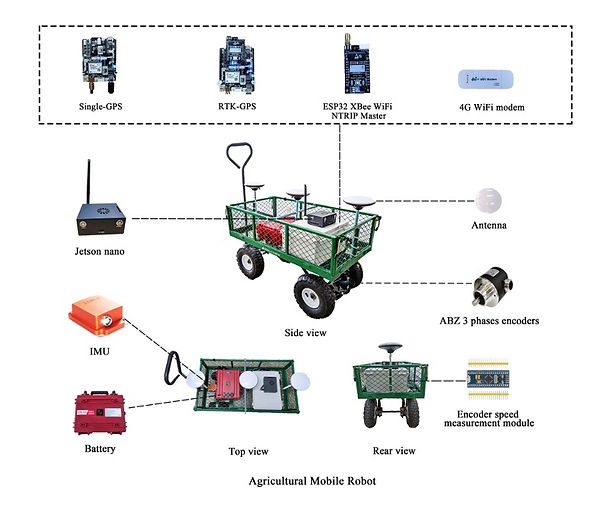
Improved Position Estimation Algorithm of Agricultural Mo-bile Robots Based on Multi-sensor Fusion and Autoencoder Neural Network
-
The agricultural mobile robot based on multi-sensor fusion will play an important role in the field of positioning and navigation, and can provide high-precision real-time position prediction in the case of interference of satellite positioning signals.
-
Agricultural mobile robots based on multi-sensor fusion will play an important role in the field of positioning and navigation. It can provide high precision real-time position prediction in the case of interference of satellite positioning signals.




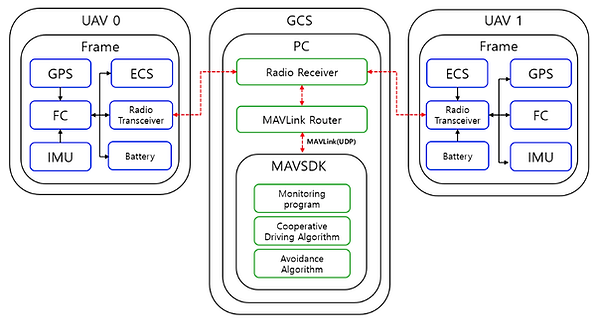
Development of Multiple UAVs Collaborative Driving System for Improving Field Phenotyping
-
Design of multiple unmanned aerial vehicles capable of real-time independent control
-
Development of a virtual environment capable of simulating the flight of multiple unmanned aerial vehicles
-
Development of multiple UAV collaborative driving algorithm and collision avoidance algorithm
-
3D models of the crop with Structure-from-Motion based on a multiple-view stereo algorithm



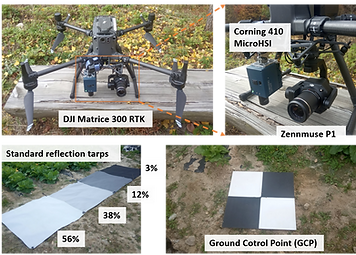
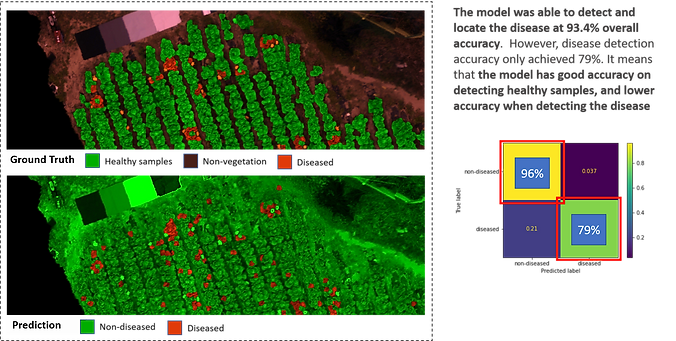
Development of Artificial Intelligence (AI) Model to Predict Downy Mildew Disease on Cabbage
-
Utilization of UAV and hyperspectral camera for data acquisition
-
Development of AI model based on hyperspectral image data
-
Early detection of downy Mildew disease on cabbage



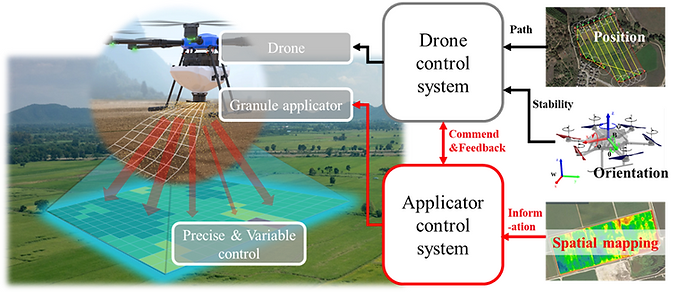
Development of UAV-based Precise Variable Spraying Control System
-
Construction of a precise spraying mathematical model through the correlation between factors such as location (spray altitude), speed (flight and wind), and type of pesticide.
-
Development of independent precision variable controller spray for drone.
-
Optimization of pest and crop disease control by drone spraying system.







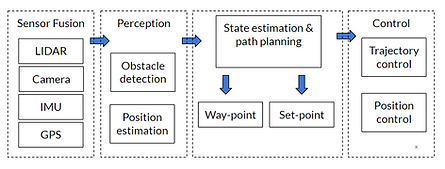
Development of Autonomous Navigation for Orchard Spraying Machine
-
Development of autonomous navigation for spraying task in orchard field
-
Development of computational methods and navigation control strategies for Unmanned Ground Vehicle (UGV) in tree-row based field
-
Utilization of several navigation sensors (GNSS, 2D LIDAR, 3D LIDAR, and Camera) for environmental information perception




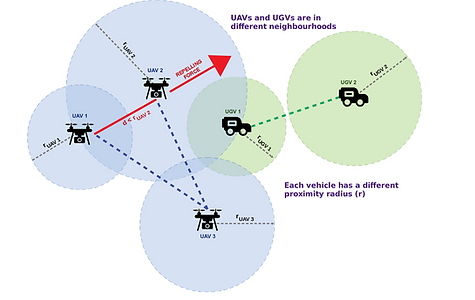
UAV-UGV Collaborative system for Improving Plant Phenotyping
-
Design of a real-time independent integrated UGV and UAV control system for plant phenotyping task
-
Constructing a virtual environment capable for simulating UGV and UAV collaboration tasks
-
The development of a collaborative driving algorithm for UGV and UAV for high-throughput plant phenotyping